Trolling Motor¶

This articles describes how to set-up a trolling motor for use with Rover
What To Buy¶
Brushed trolling motor like the Minn Kota Endura C2-30. This can be powered from a 12V lipo battery and draws about 15amps at top speed
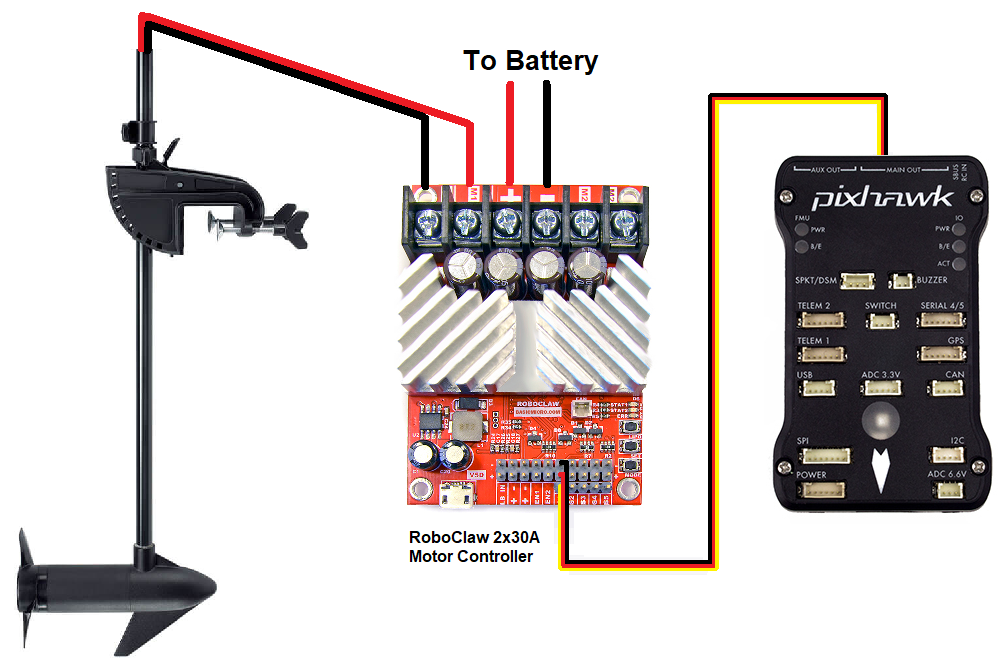
Brushed motor controller with PWM input like the Cytron SmartDrive 40 or one of the RoboClaw brushless motor controllers
3S Lipo battery with at least 20C rating and 5000mAh capacity (this should allow running at full speed for about 15min)
Connecting and Configuring¶
Remove the upper handle and control section of the motor to expose the positive and negative leads
Connect the motor leads to the M1 terminals of the brushed motor controller
Connect the motor controller’s RC input to the appropriate RC output from the autopilot (i.e. RC Output 3 for a Separate Steering and Throttle vehicle)
Test the motor moves in the correct direction using the Mission Planner’s Motor Test page (see Motor and Servo configuration wiki page). If the motor spins in the incorrect direction then reverse the black and red wires connecting the motor driver to the motor or change the SERVO3_REVERSED parameter (assuming motor controller is connected to autopilot’s RC Output 3)
If the motor does not spin at full speed try lowering SERVO3_MIN and/or increasing SERVO3_MAX (assuming motor controller is connected to autopilot’s RC Output 3)
If the motor moves slowly forwards or backwards when it should be stopped then adjust SERVO3_TRIM (assuming motor controller is connected to autopilot’s RC Output 3)