MAVProxy¶
A UAV ground station software package for MAVLink based systems
MAVProxy is a fully-functioning GCS for UAV’s, designed as a minimalist, portable and extendable GCS for any autonomous system supporting the MAVLink protocol (such as one using ArduPilot). MAVProxy is a powerful command-line based “developer” ground station software. It can be extended via add-on modules, or complemented with another ground station, such as Mission Planner, APM Planner 2, QGroundControl etc, to provide a graphical user interface.
It has a number of key features, including the ability to forward the messages from your UAV over the network via UDP to multiple other ground station software on other devices.
MAVProxy is commonly used by developers (especially with SITL) for testing new builds.
MAVProxy was first developed by CanberraUAV, to enable the use of companion computing and multiple datalinks with ArduPilot. It has grown to be one of the most versatile tools in the ArduPilot ecosystem, and many of the features users now see in other GCS tools can trace their origins to MAVProxy.
Features¶
It is a command-line, console based app. There are plugins included in MAVProxy to provide a basic GUI.
Can be networked and run over any number of computers.
It’s portable; it should run on any POSIX OS with python, pyserial, and
select()function calls, which means Linux, OS X, Windows, and others.The light-weight design means it can run on small netbooks with ease.
It supports loadable modules, and has modules to support console/s, moving maps, joysticks, antenna trackers, etc
Tab-completion of commands.
Screenshots¶
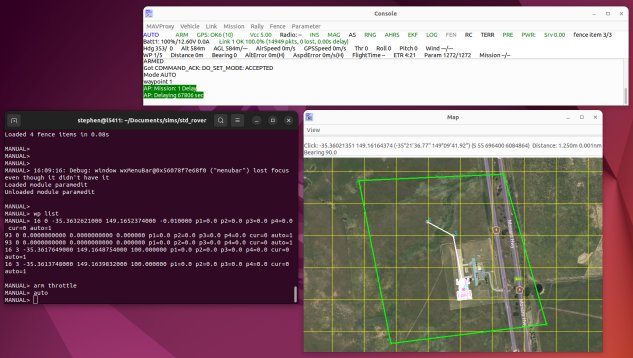
MAVProxy running under Ubuntu¶
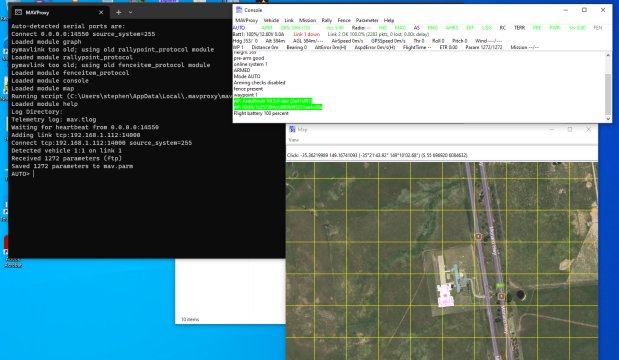
MAVProxy running under Windows 10¶
Quick Reference Card¶
A table of commonly used MAVProxy commands is available here.
License¶
MAVProxy is released under the GNU General Public License v3 or later.
Core Team¶
MAVProxy is maintained by Andrew Tridgell, Peter Barker and Stephen Dade