Non-GPS Navigation¶
These are the available options that allow a vehicle to estimate its position without a GPS. Once enabled this allows all autonomous and semi-autonomous modes just as they do would a GPS is available.
Note
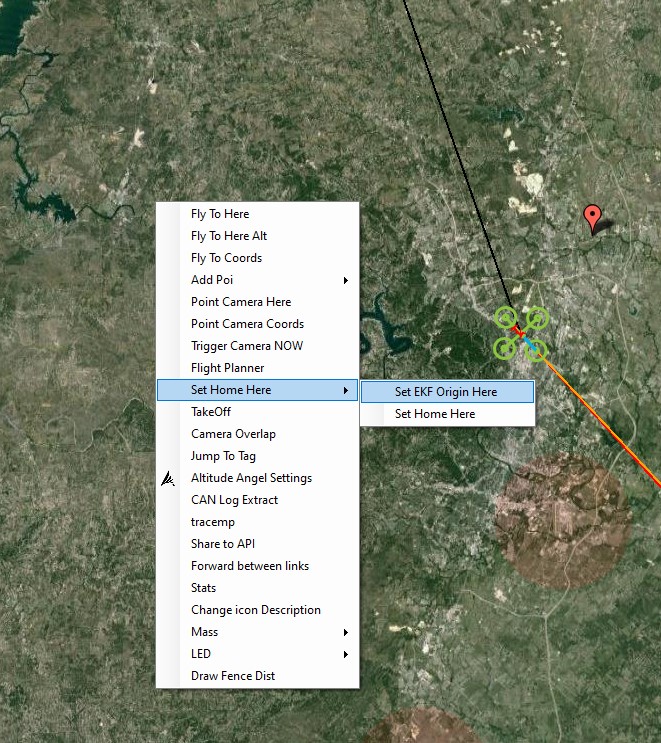
Most of the above systems (except Beacons) require that the ORIGIN be set manually, except if a GPS is present. In order to do this the user must either use the GCS to set Origin, as shown below using Mission Planner, or use a lua script like this one
Note
The low cost IMUs (accelerometers, gyros, compass) used in most autopilots drift too quickly to allow position estimation without an external velocity or position source. In other words, low-cost IMUs on their own are not sufficient for estimating position.
Note
A board with more than 1MB of flash is required to run non-GPS navigation, except for Vicon as 1MB boards still support the GPS_INPUT message, although they don’t support the GLOBAL_VISION_POSITION_ESTIMATE so they have to be run using the GPS_INPUT message. See Firmware Limitations for details.