Camera Triggering for Sony MultiPort Connectors using SkySight MONO¶
Note
this device is no longer available and this article is ARCHIVED.
This article shows how to setup the SkySight MONO to trigger pictures on cameras equipped with the Sony MultiPort™ connector
SkySightMONO and CameraCable¶
Overview¶
ArduPilot allows you to configure a servo or relay output as the control signal for the camera shutter so that it can be used in Camera Missions. Additional hardware is required to convert the shutter activation signal to the format expected by the particular camera.
Farsight’s SkySight MONO provides everything needed to connect a Pixhawk to a supported Sony MultiPort™ equipped camera in order to automate camera shutter triggering. The current list of compatible cameras is on the product page.
The board supports four camera triggering modes, allowing you to trigger the shutter in single shot and burst modes, both with and without first setting the autofocus. The mode used is determined by the servo PWM output set in the Camera Shutter Configuration in Mission Planner.
This article provides a brief overview of how to set up the board (images are reproduced courtesy of Farsight). More detailed instructions are provided in the SkySight MONO User Manual.
Parts and hardware connections¶
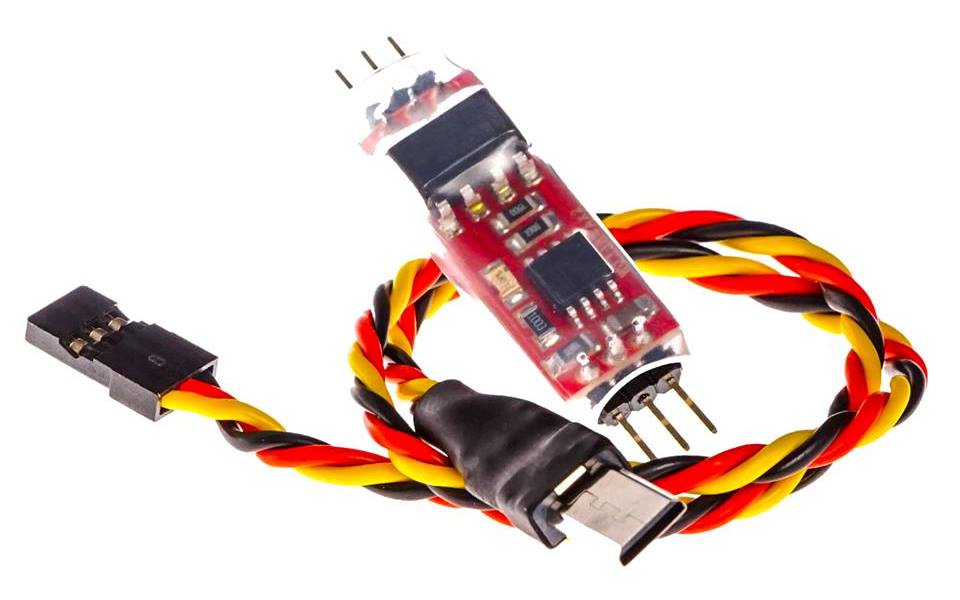
The SkySight MONO can be purchased from FarSight, and comes with the cables you need to connect to Pixhawk and the camera.
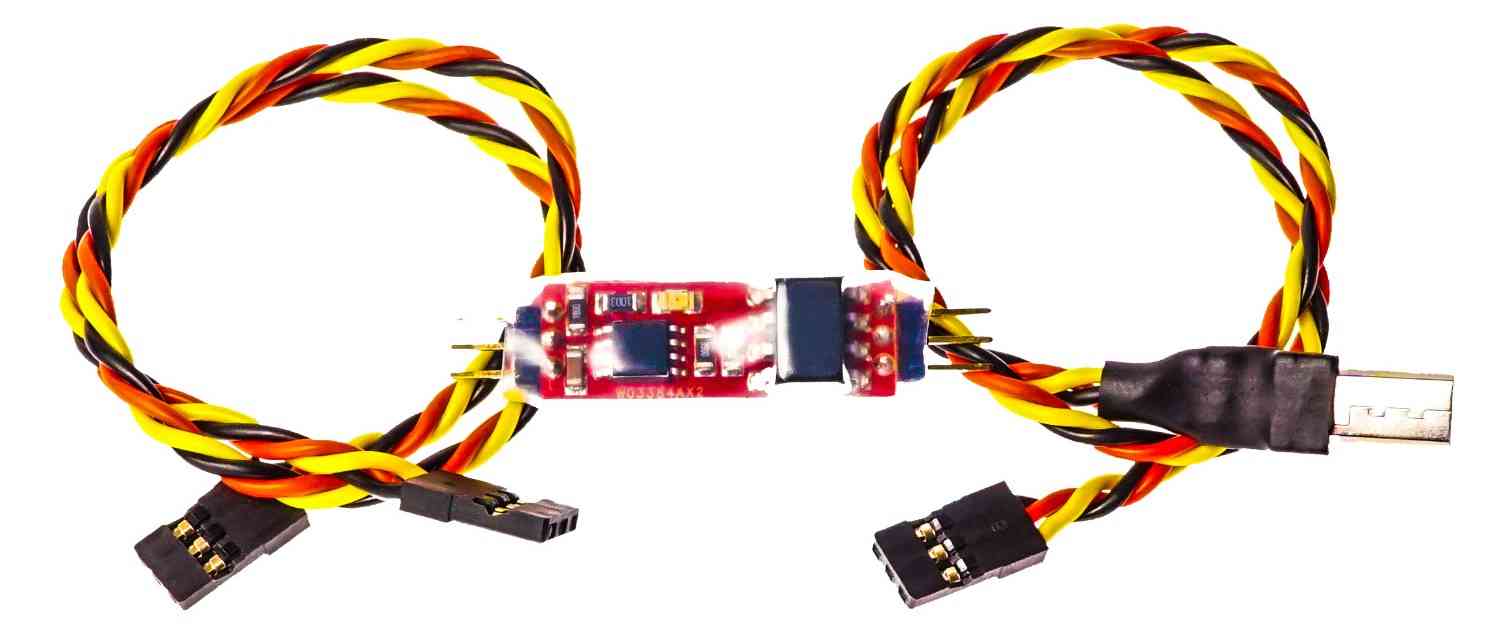
SkySight Mono: Board and Cables¶
Working out the correct connections is easy; the back of the board has colour coded connections for the power/signal/ground, and icons to indicate which connection is for the camera and which is for the servo.

SykSight Mono: Board Connections¶
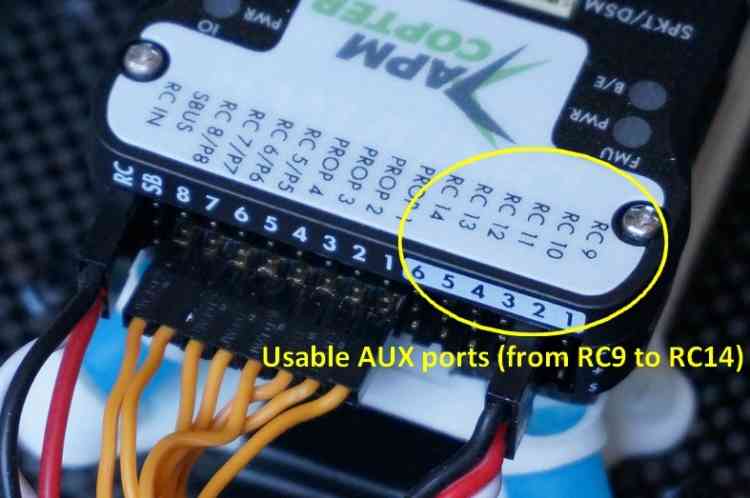
Pixhawk board¶
Pixhawk has 6 AUX ports that may be used for triggering the camera (AUX1-AUX6). These correspond to shutter options RC9-RC14 in Mission Planner
Warning
The MONO is powered from the Pixhawk servo power rail (middle pin). Ensure that the rail is powered from a BEC or provide an alternative mechanism to power the board.
Camera shutter configuration in Mission Planner¶
The Camera Shutter Configuration in Mission Planner article explains how to configure Pixhawk AUX output as a servo camera trigger.
The parameters used to configure this hardware are listed below:
CAM_TRIG_TYPE: 0 (Servo).
Shutter (Port): RC10 (for AUX2, but this will depend on your
connected output).
Shutter Pushed:
IS-S: 1300 (single shot without autofocus).IS-B: 1100 (burst mode without autofocus).AF-S: 1700 (autofocus 800ms then single shot).AF-B: 1900 (autofocus 800ms then burst mode).
Shutter Not Pushed: 1550
Shutter Duration: 4 (4/10 seconds - this may need to be tuned for
specific cameras)
Servo Limits Max%3