Independent Watchdog and Crash Dump¶
In ArduPilot 4.0 and later firmware revisions, the autopilot cpu’s internal independent watchdog has been enabled. It can be disabled (NOT recommended!) by setting BRD_OPTIONS = 0. The cpu will be reset if a peripheral or code takes too long to complete its scheduled software thread or “hangs” the cpu, and will restart the cpu. This may or may not save the vehicle if in flight or motion.
Warning
In the case of a “HARD FAULT” (illegal instruction, out of bounds memory access,etc.) instead of a delay in completing a thread in timely manner, before resetting, the code will attempt to write a file called crash_dump.bin in the flash capturing the cpu state and registers for later analysis (See section below for more details). A “HARD FAULT” is extremely serious and should be reported to ArduPilot. The vehicle is probably not safe to fly until the cause is resolved.
Determining that a Watchdog Reset Occurred¶
One way is by looking at the dataflash logs. If the log is filtered to show only the “MSG” messages it can be seen that some include the word, “watchdog”. This is a clear indication that the previous log or flight ended with a watchdog reset.
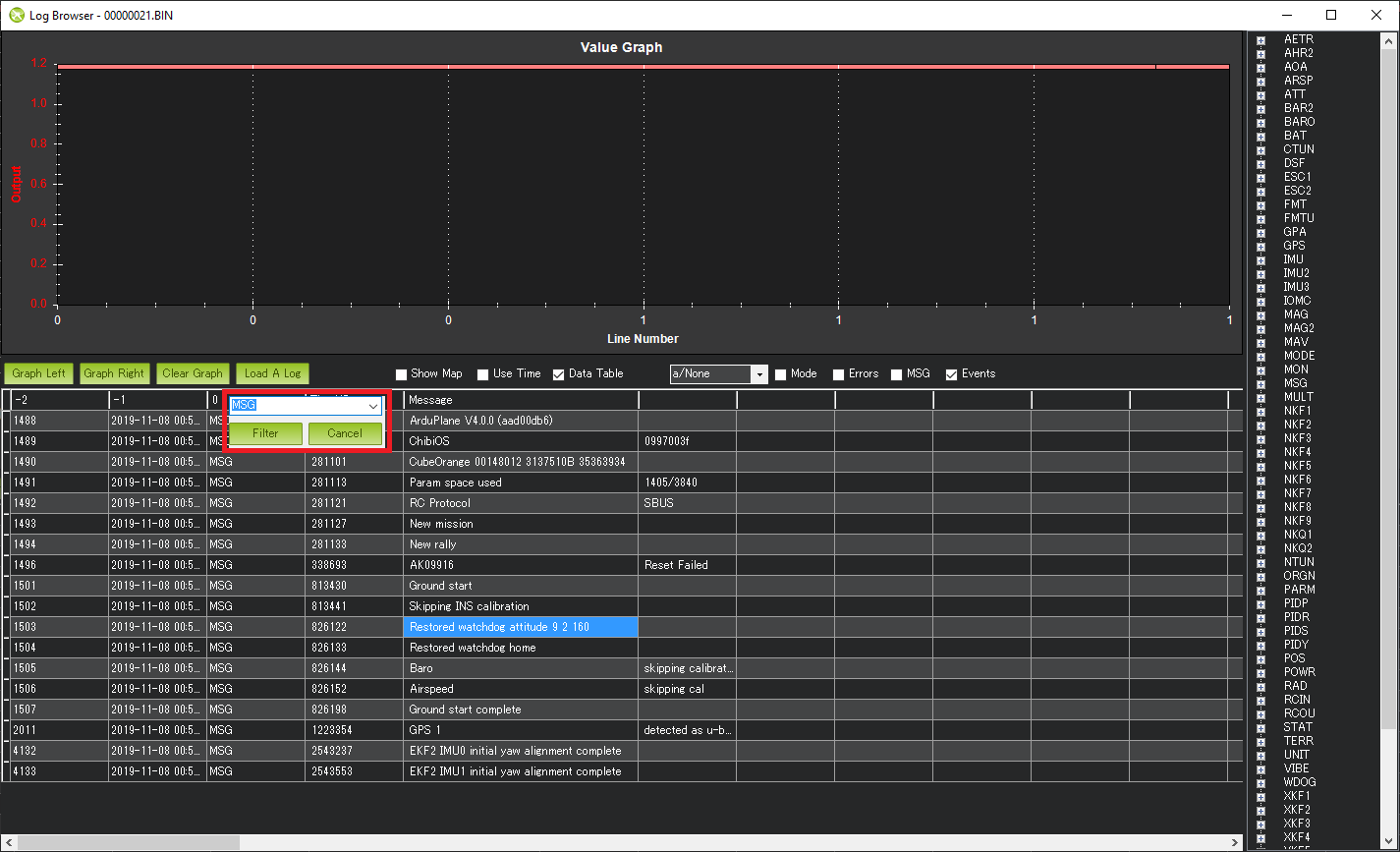
A WDOG log message should also appear with the following columns that may be useful for developers investigating the cause of the watchdog
Task: The scheduler task number OR
-1 if the main loop just received the next IMU sample
-2 if the fast loop had started
-3 if the main loop was waiting for the next IMU sample
IErr : Mask of Internal Errors
IErrCnt : Internal Error Count
MavMsg : MAVLink message id of last processed message
MavCmd : MAVLink COMMAND_LONG or COMMAND_LONG_INT message’s command field from last processed message
SemLine : Source code line number if program is waiting for a semaphore or 0 if not waiting
FL : Fault Line, the source code line number where the fault occurred. Note this does not specify the filename but it can still be useful
FT : Fault Type (see FaultType enum in AP_HAL_ChibiOS/system.cpp)
1 = Reset
2 = Non-Maskable Interrupt (aka NMI)
3 = Hard Fault (the most common)
4 = Memory Management Fault
5 = Bus Fault
6 = Usage Fault
FA : Fault Address (in memory). For example this would be 0 in case an attempt was made to read a byte using a nullptr
FP : Thread Priority (see list of priorities starting with APM_MONITOR_PRIORITY in AP_HAL_ChibiOS/Scheduler.h)
ICSR : Interrupt Control and State Register (see “ICSR bit assignments” in ST datasheets)
CRASH DUMP¶
On a “HARD FAULT”, a file will be attempted to be written to the “@SYS” flash area as “crash_dump.bin” containing needed system state information for later diagnosis. This file can be downloaded using Misssion Planner or other GCS for forwarding to ArduPilot, either by forum or Discord post.

In addition to the crash_dump.bin file, the preceding dataflash log or the git-hash of the firmware that caused the crash dump should be included in the post of the file.

As of version 4.5.1, if a crash_dump.bin file has been created, a pre-arm failure will be activated to warn the user of the crash dump so that it may be reported. The pre-arm may be cleared by either re-flashing firmware to the autopilot or by setting the ARMING_CRSDP_IGN param to 1 (not recommended).