HOTT Telemetry¶
Plane-4.0.0 (and higher), Copter-4.0.4 (and higher) and Rover-4.1.0 (and higher) support Graupner HOTT telemetry.

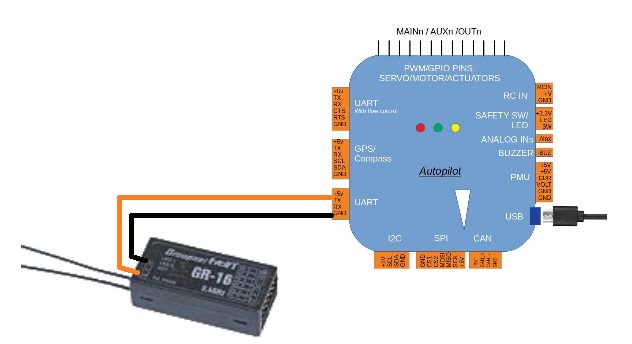
Wiring and Setup¶
Connection to the autopilot is via any UART port’s TX input, although one without RTS/CTS flow control is simpler to configure, since flow control is not required.
To enable HOTT telemetry, for example on the first TELEM port SERIAL1:
SERIAL1_BAUD set to 19 (for 19.2KBaud)
SERIAL1_PROTOCOL set to 27 (HOTT)
SERIAL1_OPTIONS set to 4 (Half Duplex)
BRD_SER1_RTSCTS set to 0 to disable flow control (optional)