Loiter Mode¶
Loiter mode allows boats to hold position in a strong current.
Note
This mode is available in Rover-3.4 (and higher).
If the mode does not appear in the Flight mode setup screen you can manually set a MODEx parameter to ‘5’.
The way this mode works is:
the user switches into Loiter mode and the vehicle’s current position, velocity and maximum deceleration are used to project a reasonable stopping point
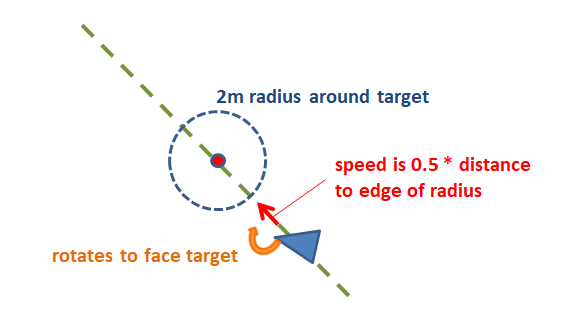
while the boat is within the LOIT_RADIUS of the target it simply drifts
if/when the boat strays more than LOIT_RADIUS from the target it:
rotates to point either directly towards the target or directly away from it (whichever results in less rotation)
drives/floats forwards or backwards at 0.5 m/s * the distance to the edge of the circle around the target, but at a speed no greater than WP_SPEED.
Tip
In order to obtain the optimum performance, the ESC deadband should be small. The MOT_THR_MIN can be used to compensate for ESC deadband. See this section for details.