Guided mode¶
Guided mode is designed to allow ground stations or companion computers to control the vehicle.
Sending Commands from the Ground Station¶
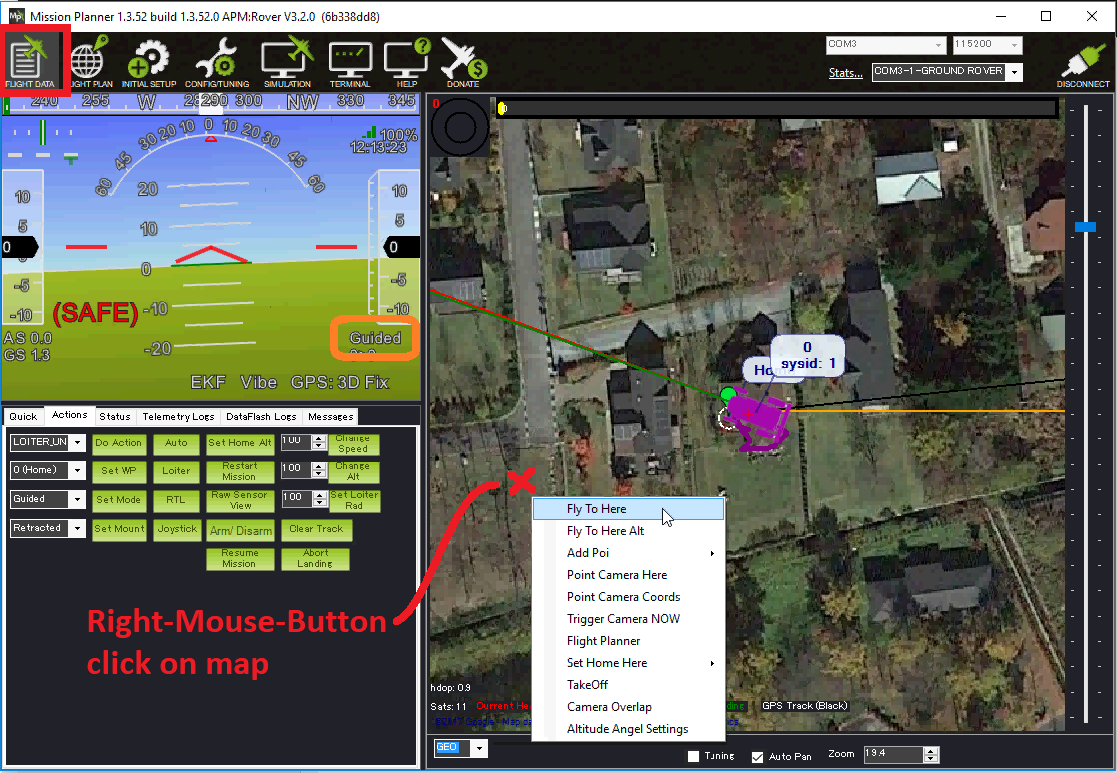
Most ground stations support commanding the vehicle to drive to a location specified by clicking on the map. If using the Mission Planner:
connect to the vehicle with a telemetry radio
from the Flight Data screen, right-mouse-button click on the map and select “Fly To Here”.
the vehicle will switch to Guided mode and attempted to drive to the location specified.
once at the destination it will hold position if a surface vehicle, or loiter/circle around the destination if it is a boat.
The ground station will normally set the vehicle to Guided mode before the target destination is sent meaning it is not necessary to set up Guided mode on the transmitter mode switch.
Speed¶
While the vehicle is travelling, the user can increase the vehicle’s speed by raising the transmitter’s throttle stick to between 75% and 100%. At 75% the vehicle will remain at it’s configured speed (i.e. WP_SPEED or CRUISE if WP_SPEED is zero, versions of Rover after 3.5.1 use only WP_SPEED), this linearly increases to the vehicle’s maximum speed as the pilot’s throttle stick reaches 100%.
Other controls¶
These additional MAVLink messages are supported in Guided mode. These are listed mostly for developers of ground stations or companion computers applications:
MAV_CMD_NAV_SET_YAW_SPEEDcommands within a COMMAND_LONG