ARK CANnode¶
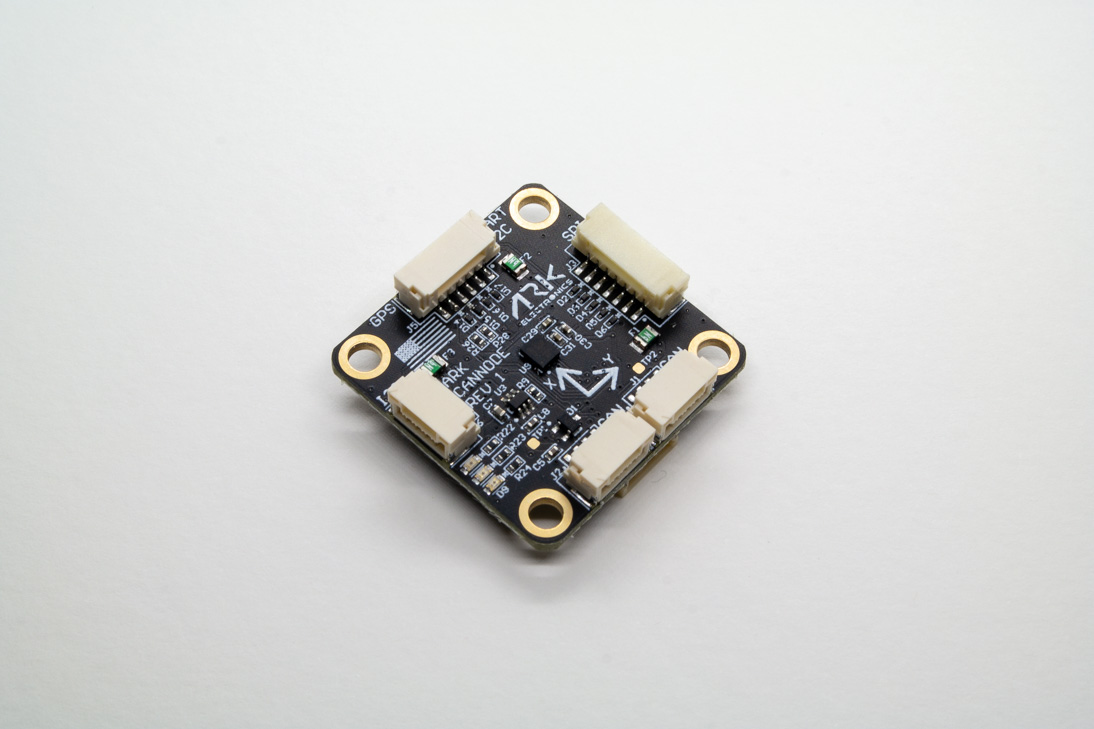
ARK CANNode is an open-source generic DroneCAN node that includes a 6-degree-of-freedom IMU. Its main purpose is to enable the use of non-CAN sensors (I2C, SPI, UART) on the CAN bus. It also has PWM outputs to expand a vehicle’s control outputs in quantity and physical distance. For ArduPilot, AP_Periph can be used to integrate the CANNode as a peripheral.
Specifications¶
Sensors
Bosch BMI088 6-Axis IMU or Invensense ICM-42688-P 6-Axis IMU
Microcontroller
STM32F412CGU6 MCU
1MB Flash
Connections
Two Pixhawk Standard CAN Connectors
4 Pin JST GH
Pixhawk Standard I2C Connector
4 Pin JST GH
Pixhawk Standard UART/I2C Connector (Basic GPS Port)
6 Pin JST GH
Pixhawk Standard SPI Connector
7 Pin JST GH
PWM Connector
10 Pin JST GH
8 PWM Outputs
Matches Pixhawk 4 PWM Connector Pinout
Pixhawk Standard Debug Connector
6 Pin JST SH
Power Requirements
5V
Current dependent on connected peripherals
Other
USA Built
LED Indicators
Additional Information
Dimensions: 3 cm x 3 cm x 1.3 cm