Parachute¶

This topic describes how to set up manual and automatic parachute release.
Warning
A parachute ejection can be dangerous. This feature should be used with caution
Video above is from Henri’s DIYDrones discussion that led to this feature being added to Copter.
What you will need¶
A complete parachute mechanism like one of these:
OR if you prefer a DIY solution, parachute release mechanism that can be triggered by a PWM signal (i.e. a Servo) and a parachute large enough to slow your multicopter’s decent to less than 5m/s. Some recommended parachute vendors:
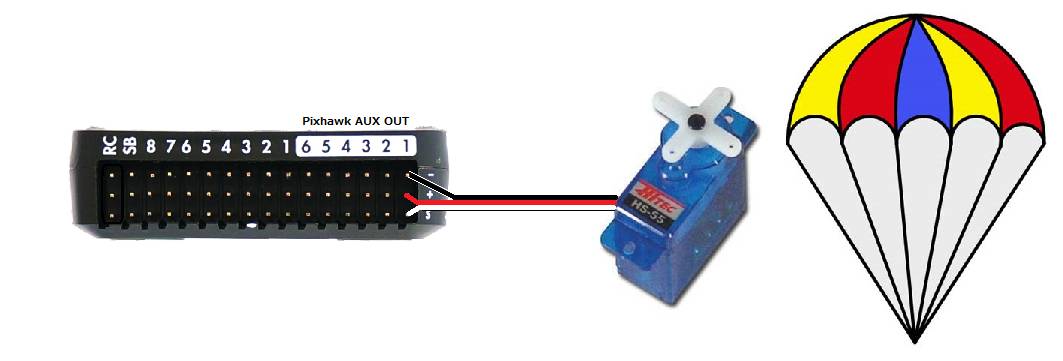
Connecting to the Autopilot¶
The parachute release mechanism can be triggered from either a Relay or a PWM (i.e. Servo). Be sure that if a Relay pin is used, that the parachute release is active on a high level and that the Relay pin default, RELAY_DEFAULT is OFF or No Change, to avoid triggering the release during initialization, since all GPIOs are forced low during the bootloader period.
Setup through the Mission Planner¶
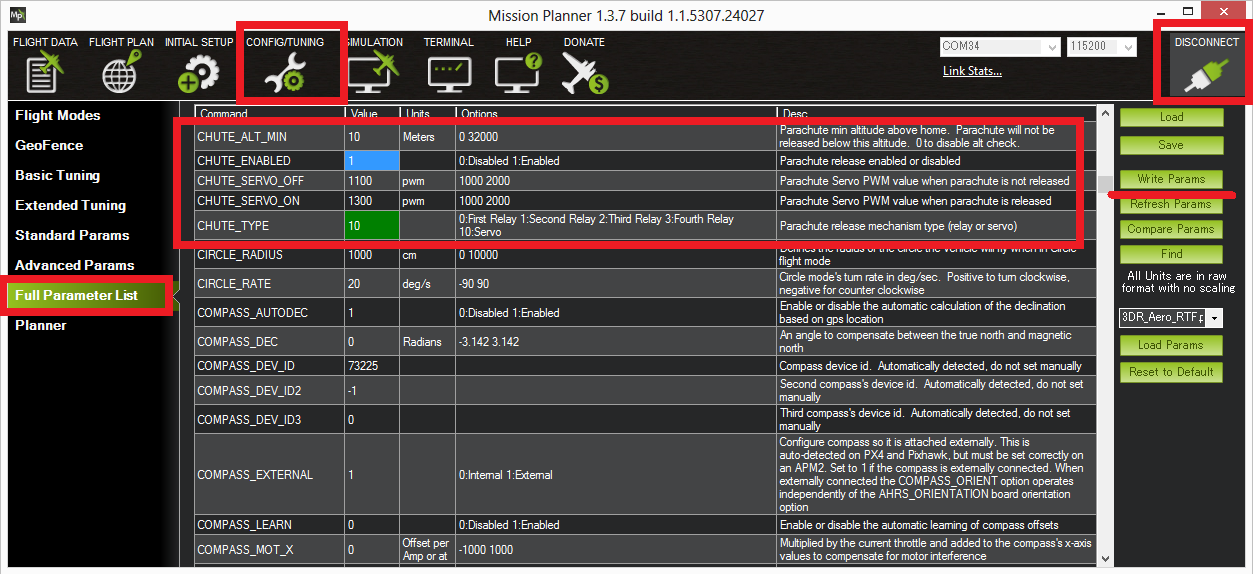
To configure the parachute release, first connect to the autopilot with Mission Planner, and then open the CONFIG->Full Parameter List tab and set the following parameters.
CHUTE_ENABLED = “1”. Then refresh parameters, or reboot, to see the Chute parameters.
CHUTE_CRT_SINK should be set to the sink rate in m/s that will trigger the chute release.
CHUTE_ALT_MIN determines the minimum altitude above HOME that allows parachute release to occur.
Servo Release¶
CHUTE_TYPE = “10” to release with a servo
CHUTE_SERVO_ON should be set to the servo position required to release the parachute
CHUTE_SERVO_OFF should be the “resting” servo position. I.e. the position the servo is in before the parachute is released
set SERVO9_FUNCTION = “27”. On autopilots with an IOMCU (Outputs labeled MAIN and AUX),
SERVO9refers to the Pixhawk’s AUX OUT 1. To use AUX OUT2 instead set SERVO10_FUNCTION to 27, etc.
Relay Release¶
Determine/Configure a pin to be a GPIO (see GPIOs).
Set that pin number as one of the RELAY functions. ie For GPIO pin 51 using the first RELAY function, set RELAY1_PIN = 51.
Since GPIOs are always set low initially during the bootloader period, to avoid accidental release, always use a release mechanism that needs a high output level to trigger and set:
RELAY1_DEFAULT = 1 or 2 (low or no change), which determines how RELAY1 pins is set during the post-bootloader, autopilot initialization period.
CHUTE_TYPE = 0,1,2,or 3 to release with RELAY, RELAY2, RELAY3, or RELAY4 functions.

Manual Release¶
The pilot can manually release the parachute using an RC channel/switch: set an RCx_OPTION to either 22 (Parachute Release) or 23 (Parachute 3Pos). Either function, when the RC channel is high, above CHUTE_ALT_MIN, and is armed (Copter) or flying (Plane). See following section for requirements.
MAVLink Command Release¶
The parachute may also be released/enabled/disabled via Ground Control Station command: MAV_CMD_DO_PARACHUTE (cmd id #208). This command has a parameter1 field that determines the action:
param1 |
Action |
|---|---|
0 |
Disable Parachute release |
1 |
Enable Parachute release |
2 |
Release Parachute |
This command can be part of an AUTO mission as a DO_PARACHUTE waypoint.
Failsafe Action¶
Plane also provides for a parachute release failsafe action for FS_LONG_ACTN and BATTx_FS_CRT_ACT.
Parachute Options¶
An option to force the release servo or relay to remain active forever (until reboot) once triggered. This used in high altitude situations where the servo or relay may be frozen due to extremely low temperatures, until lower altitude, and warmer temperatures allow operation. This can be enabled by setting the CHUTE_OPTIONS bit 0 high.
Setting bit 1 high of CHUTE_OPTIONS will not disarm the vehicle before releasing the chute.
RC Disable/Enable of Parachute¶
You can disable or enable the parachute automatic release using an RC channel/switch: set an RCx_OPTION to 21. A high enables the automatic release function, low disables it. Manual release is unaffected. If set to 23 (Parachute 3Pos), the low position disables, middle position enables auto operation, a high will attempt to force release, as explained above, assuming the enabling conditions described below.
When will the parachute deploy?¶
When the “Crash Check” feature determines that the vehicle has lost attitude control and has begun falling, the motors will be stopped and the parachute will deploy automatically. The following must all be true for a full 1 seconds for the crash checker to trigger the parachute release:
The motors are armed (Copter) or flying (Plane)
The vehicle is not landed (Copter only)
The vehicle is not in FLIP or ACRO flight mode (Copter only)
the roll and/or pitch angle of the vehicle is 30 degrees off from the target lean angle (Copter only)
the barometer shows the vehicle is not climbing (excessive baro noise CAN prevent release in some cases) (Copter & Plane)
the vehicle is above the CHUTE_ALT_MIN altitude (Copter & Plane). A value of “0” disables this check.
Testing the chute¶
Depending upon the release mechanism a parachute deployment can be dangerous so please take care when performing these tests, removing the parachute and vehicle propellers as is appropriate.
To test manual deployment:
Enable parachute release, if using a switch to disable release
Set the CHUTE_ALT_MIN parameter to zero to disable the minimum altitude check
Arm the vehicle in stabilize mode and raise the throttle above minimum (disconnect motors or remove props) (not required for Plane)
Use one of the above manual RC channel switch activation methods or use Mission Planner SERVO/RELAY tab to switch the release Relay, MAVLink command, or set the PWM of the release servo.
You should see the motors stop, the parachute release mechanism activate, and if telemetry is attached, “Parachute: Released!” should appear on the Flight Data screen’s HUD.
To test the automatic deployment:
Set the CHUTE_ALT_MIN parameter to zero to disable the minimum altitude check
Arm the vehicle in stabilize mode and raise the throttle above minimum
somehow tilt the vehicle over by at least 30 degrees while lowering it (the barometer shows the vehicle is descending)
After 1 seconds, the motors should stop, the parachute servo will move and if Mission Planner is attached, “Parachute: Released” should appear on the Flight Data screen’s HUD.
After the test is complete, return the CHUTE_ALT_MIN to the desired altitude (default is 10m)