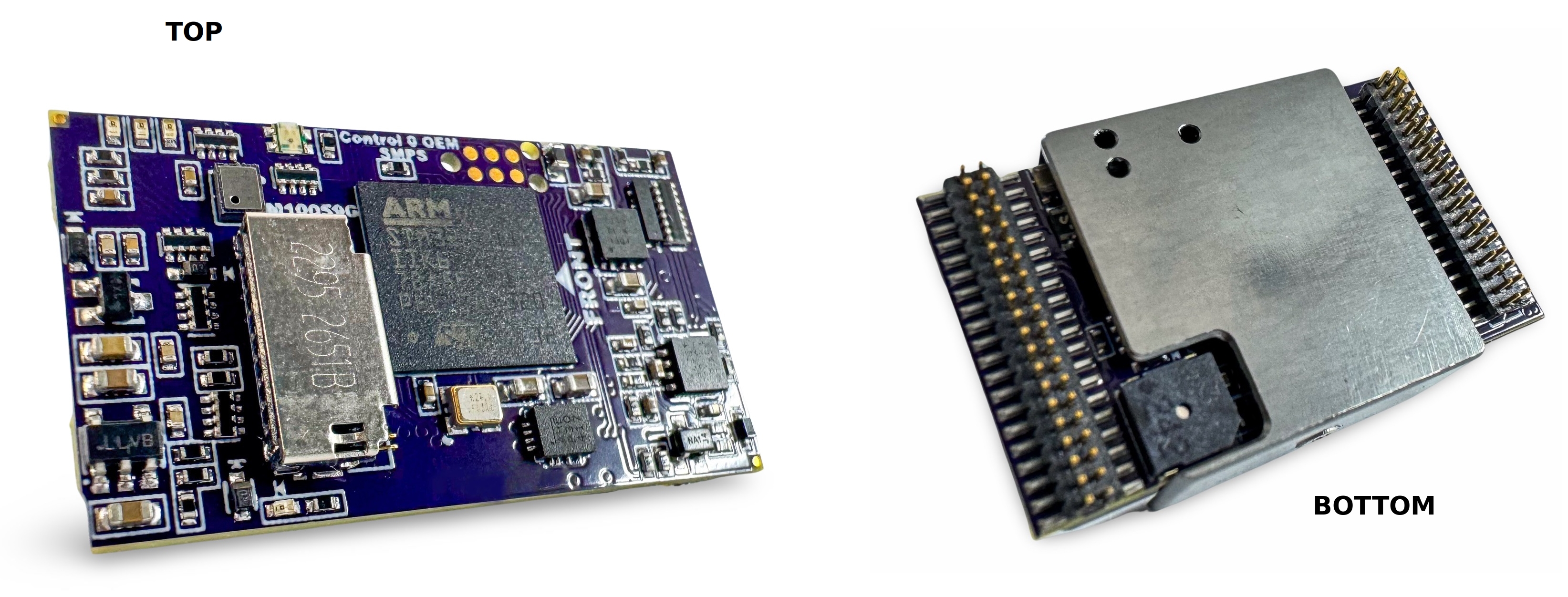
3DR_Control_Zero_H7_OEM_G¶
The Control Zero H7 OEM revision G is a flight controller produced by 3DR (mRo)]
Specifications¶
- Processor
STM32H743IIK6 32-bit processor
256KB FRAM
- Sensors
BMI088, ICM20602 Acc/Gyro
ICM20948 Acc/Gyro/Mag
DPS368 Barometer
- Power
External 5V , 1A supply is required
Internal 3.3V BEC for sensors is provided on-board
- Interfaces
One 36pin and one 40pin Samtec Connector for signals on bottom
8x PWM outputs BiDirDShot capable
1x RC input
5x UARTs (2 with flow control)
3x I2C ports for external compass, airspeed, etc.
2x CAN
1x SPI
SWD via TC2030 header
MicroSD card socket
External battery monitor inputs for current and voltage
Size and Dimensions
34mm x 20mm
3.66g
Where to Buy¶
Pinouts¶
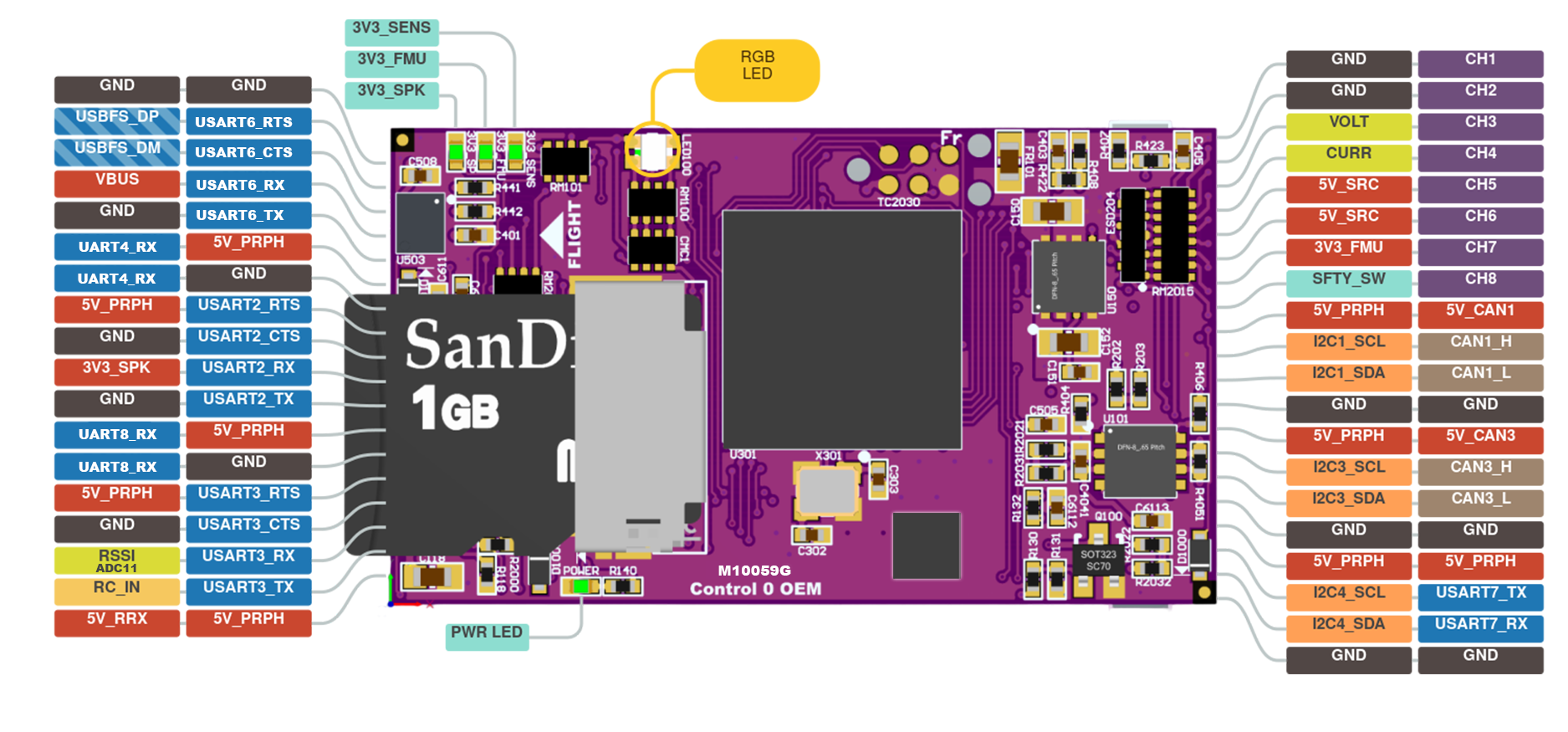
Default UART order¶
The UARTs are marked Rn and Tn in the above pinouts. The Rn pin is the receive pin for UARTn. The Tn pin is the transmit pin for UARTn.
SERIAL0 -> USB
SERIAL1 -> USART2 (TELEM1) (DMA enabled) with CTS/RTS
SERIAL2 -> USART3 (TELEM2) (DMA enabled)
SERIAL3 -> UART4 (GPS) (DMA enabled)
SERIAL4 -> UART8 (GPS2) (DMA enable)
SERIAL5 -> UART5 (User) (DMA capable)
SERIAL6 -> USART6 (User) (DMA enabled) with CTS/RTS
SERIAL7 -> USB (SLCAN)
Serial protocols shown are defaults, but can be adjusted to personal preferences.
Servo/Motor Outputs¶
The KakuteH7 supports up to 14 PWM outputs. All outputs support DShot and BiDirDshot. Outputs are grouped and all outputs within their group must be the same protocol.
The PWM is in 5 groups:
PWM 1-4 in group1
PWM 5,6 in group2
PWM 7,8 in group3
RC Input¶
RC input is configured on the RC_IN pin. All unidirectional RC protocols are supported. For bi-directional protocols, like CRSF a normal UART is required. For example, USART6 (SERAIL6) could be used.
With this option, SERIAL6_PROTOCOL must be set to “23”, and:
PPM is not supported.
SBUS/DSM/SRXL connects to the RX6 pin.
FPort requires connection to TX6 and RX6 via a bi-directional inverter. See FPort Receivers.
CRSF also requires a TX6 connection, in addition to RX6, and automatically provides telemetry.
SRXL2 requires a connection to TX6 and automatically provides telemetry. Set SERIAL6_OPTIONS to “4”.
Any UART can be used for RC system connections in ArduPilot also, and is compatible with all protocols except PPM. See Radio Control Systems for details.
## Analog Inputs
The Control Zero H7 OEM revision G has 4 ADC inputs:
ADC1 Pin11 -> RSSI IN
ADC1 Pin14 -> Battery Voltage
ADC1 Pin15 -> Battery Current
ADC1 Pin18 -> 5V Sensor
CAN¶
There are two CAN ports which are pre-configured for DroneCAN, which may be changed by the user as desired. See CAN Bus Setup for more information on setup.
Battery Monitor Configuration¶
The board has a built-in voltage and external current sensor input.
The following settings are set by default on the board to work with a Power Zero Module (M10077)
BATT_MONITOR =4
BATT_VOLT_MULT 15.3
Other Power Module will need to adjust these values.
Firmware¶
This board comes with ArduPilot firmware pre-installed and other vehicle/revision Ardupilot firmware can be loaded using most Ground Control Stations.
Firmware for this board can be found here in sub-folders labeled “3DRControlZeroG”.