ROS 2 with Gazebo¶
The purpose of this guide is to show how to integrate ArduPilot with Gazebo using ROS 2.
Prerequisites¶
Ensure you have the prerequisites complete and working before beginning this Gazebo tutorial.
Install Gazebo¶
First, install Gazebo Harmonic (recommended) or Gazebo Garden.
Next, set up all the necessary ROS 2 packages in the workspace.
We will clone the required repositories using vcstool and a ros2.repos files:
cd ~/ardu_ws
vcs import --input https://raw.githubusercontent.com/ArduPilot/ardupilot_gz/main/ros2_gz.repos --recursive src
Set the Gazebo version to either harmonic (recommended) or garden.
It’s recommended to set this in your ~/.bashrc file.
export GZ_VERSION=harmonic
Add Gazebo APT sources.
sudo apt install wget
wget https://packages.osrfoundation.org/gazebo.gpg -O /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null
sudo apt update
Add Gazebo sources to rosdep for the non-default pairing of ROS 2 Humble and Gazebo Harmonic.
wget https://raw.githubusercontent.com/osrf/osrf-rosdep/master/gz/00-gazebo.list -O /etc/ros/rosdep/sources.list.d/00-gazebo.list
rosdep update
Update ROS and Gazebo dependencies:
cd ~/ardu_ws
source /opt/ros/humble/setup.bash
sudo apt update
rosdep update
rosdep install --from-paths src --ignore-src -y
Build and Run Tests¶
Build:
cd ~/ardu_ws
colcon build --packages-up-to ardupilot_gz_bringup
If you’d like to test your installation, run:
cd ~/ardu_ws
source install/setup.bash
colcon test --packages-select ardupilot_sitl ardupilot_dds_tests ardupilot_gazebo ardupilot_gz_applications ardupilot_gz_description ardupilot_gz_gazebo ardupilot_gz_bringup
colcon test-result --all --verbose
Run the Simulation¶
Finally, you can source the workspace and launch one of the example Gazebo simulations:
source install/setup.bash
ros2 launch ardupilot_gz_bringup iris_runway.launch.py
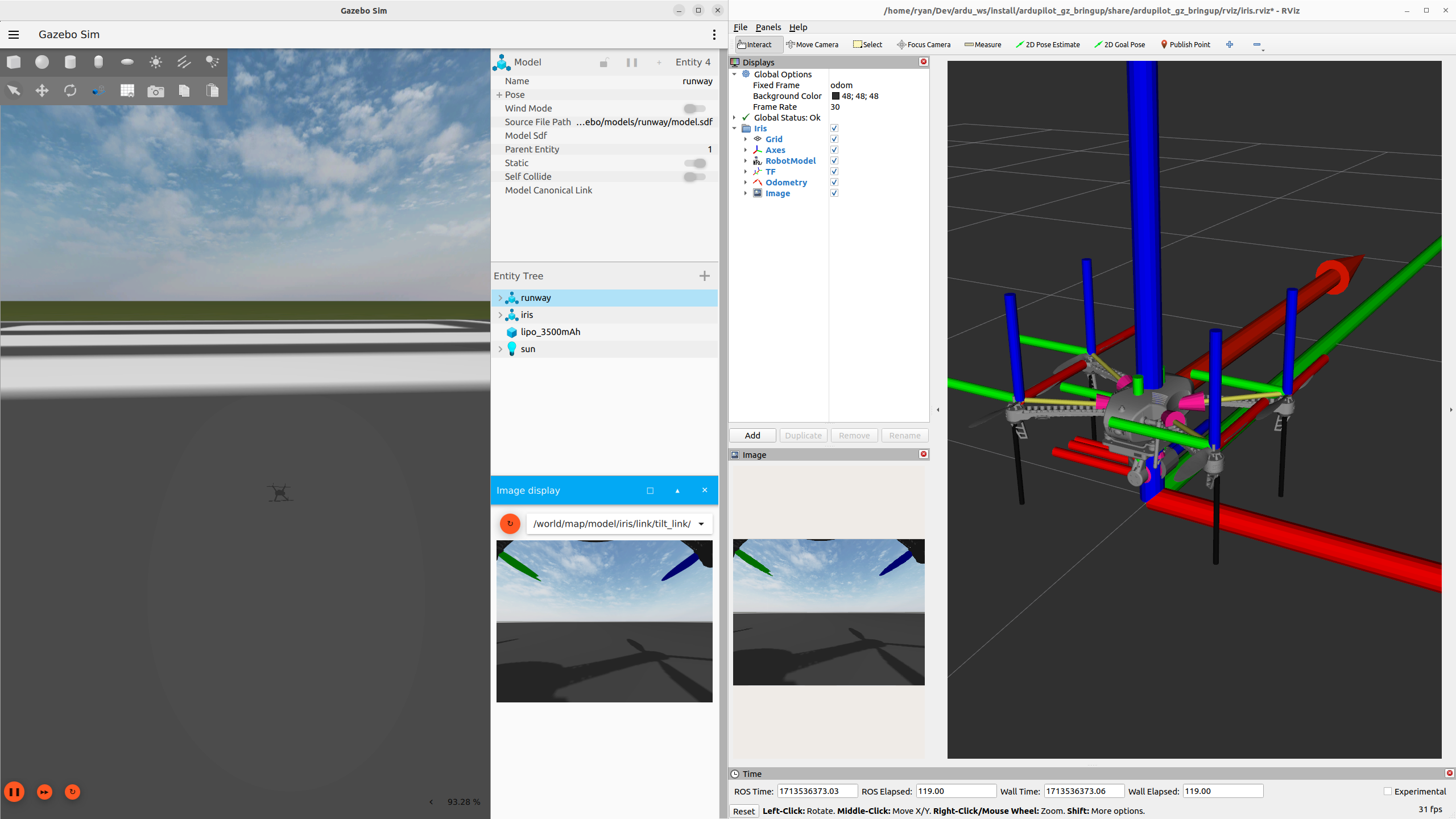
By default, this launch file starts ArduPilot SITL, Gazebo, and RViz with a single command.
For more information regarding the ardupilot_gz package refer to ardupilot_gz/README.md.
Examples available¶
Iris Runway (Copter)
ros2 launch ardupilot_gz_bringup iris_runway.launch.py
Iris Maze (Copter)
ros2 launch ardupilot_gz_bringup iris_maze.launch.py
WildThumper (Rover)
ros2 launch ardupilot_gz_bringup wildthumper.launch.py
Here is a demo video of ArduPilot working with ROS 2 and Gazebo:
Next up¶
Run Cartographer SLAM in Cartographer SLAM with ROS 2 in SITL