Multiple Vehicles with MAVProxy¶
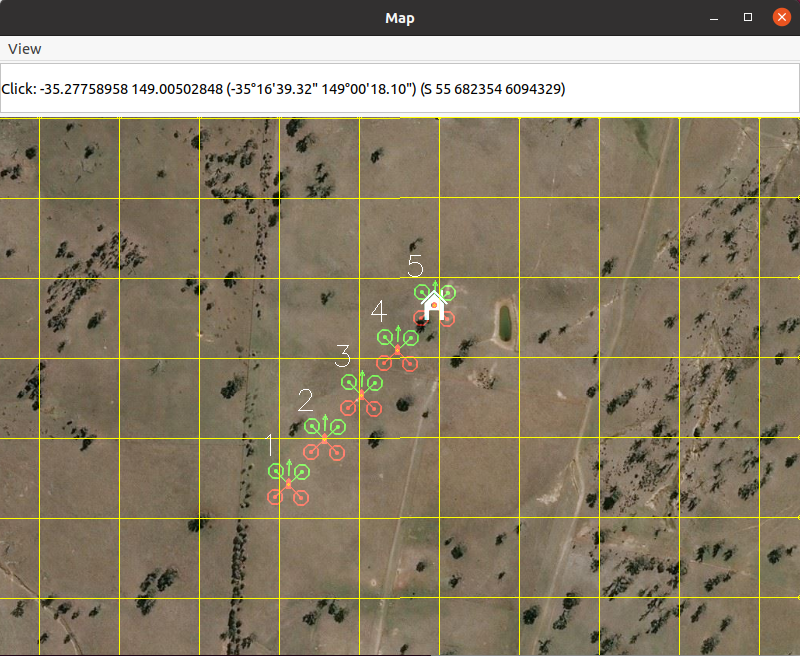
MAVProxy has support for multi-vehicle operations.
To use this feature, ensure all vehicles (real or SITL) have different SYSID_THISMAV parameter values. Use param set SYSID_THISMAV X to set this value in the MAVProxy console (where X is the id).
Most MAVProxy modules are designed to talk to only 1 vehicle at a time. This is the active vehicle. To change which vehicle is active, use the Vehicle dropdown menu on the graphical console. All modules will then send any relevant commands to that vehicle only.
In the terminal, there are two options available:
Use
alllinks <cmd>to send <cmd> to all vehicles in turn. For example,alllinks mode rtlwill set RTL mode on all vehicles.Use
vehicle <n>to set the active vehicle
See the swarm module for a GUI for automating swarm management and operations.