Copter Position Control and Navigation¶
This page covers the basics of Copter’s Position Control and Waypoint Navigation libraries
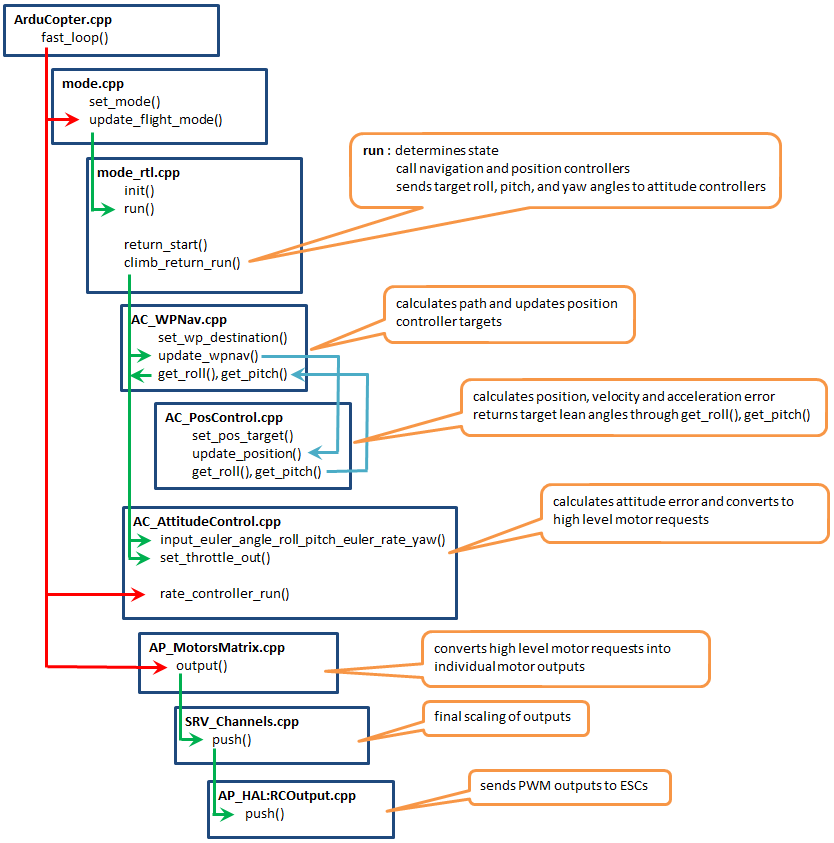
As a reference the diagram below provides a high level code flow view of Copter’s RTL mode
Class Hierarchy and Description¶
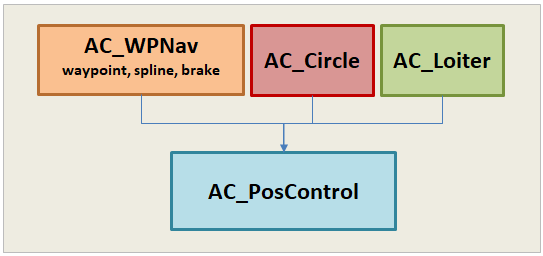
At the highest level, AC_WPNav, AC_Circle and AC_Loiter libraries are peers and all make use of the AC_PosControl library
AC_WPNav is made up of three independent controllers (these may be separated into individual libraries in the future):
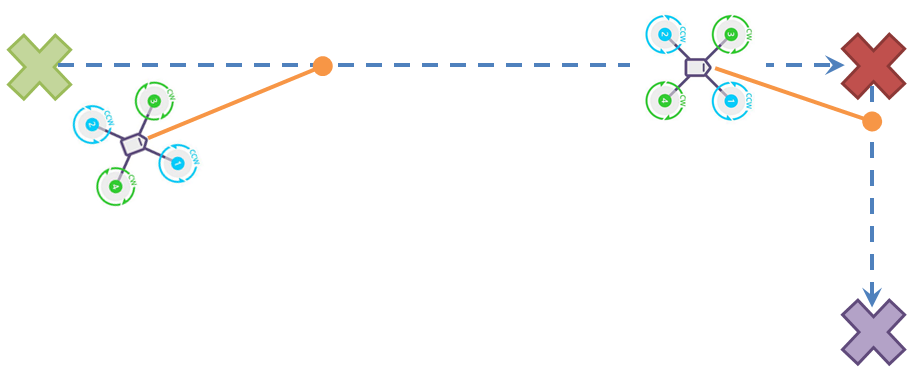
Waypoint attempts to fly the vehicle in a straight line to a target waypoints. This interface accepts a 3D target destination specified as a latitude, longitude and altitude or as an offset from the EKF origin
Spline flies the vehile in a smooth curved path to a 3D target waypoint with a final velocity that will allow it to continue smoothly towards a subsequent waypoint. Its interface is very similar to the Waypoint controller above
Brake tries to slow the vehicle to a stop as quickly as possible
Waypoint, Spline and Brake controllers do not use PIDs directly. Instead they update target positions or velocities which are then passed to the Position Controller
AC_PosControl:
Separate interfaces for horizontal (X and Y axis) control and vertical (Z-axis) control. These interfaces are separated because some flight modes (like AltHold mode) only require the Z-axis controller
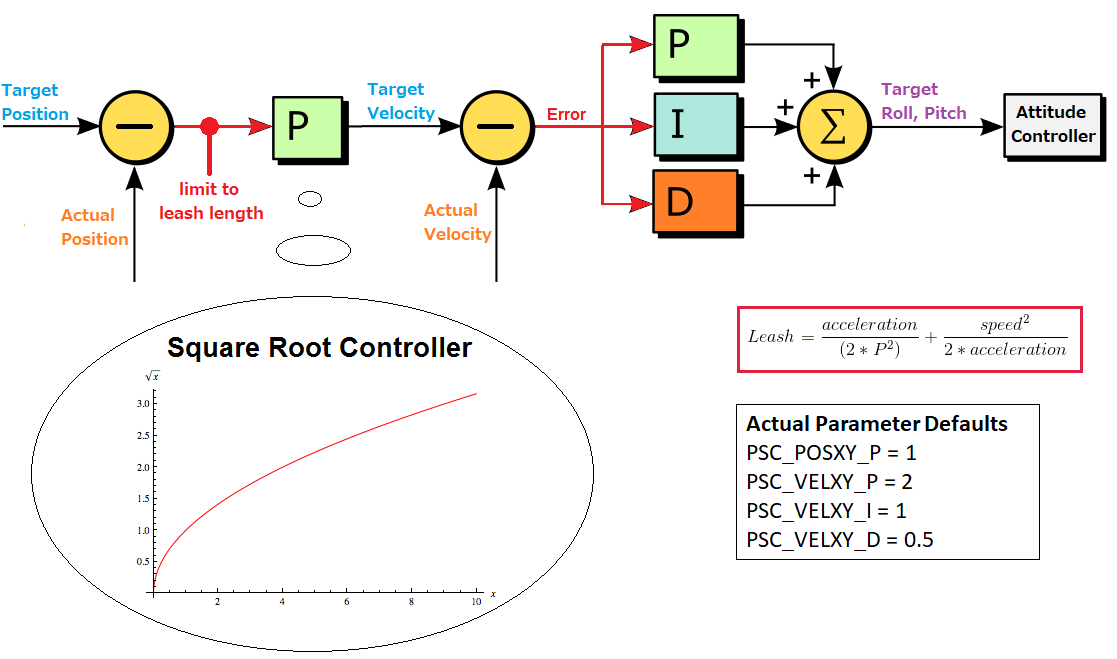
Layered PID controllers are used
XY axis uses a Position P to convert position error to a target velocity. A velocity PID converts velocity error into a desired acceleration which is then converted to a desired lean angle which is then sent into the attitude control library.
The Z axis uses a Position P controller to convert position error to a target vertical velocity (aka climb rate). A Velocity P controller converts velocity error to a desired acceleration. An Acceleration PID converts acceleration error into a desired throttle which is then sent into the attitude control library (which mostly just passes it through to the low level motors library)
AC_PosControl also includes a 3D velocity controller and a 3D Position+Velocity controller