Code Overview (Copter)¶
The code is made up of the main Copter code which resides in its own directory, and the libraries which are shared with Plane and Rover.
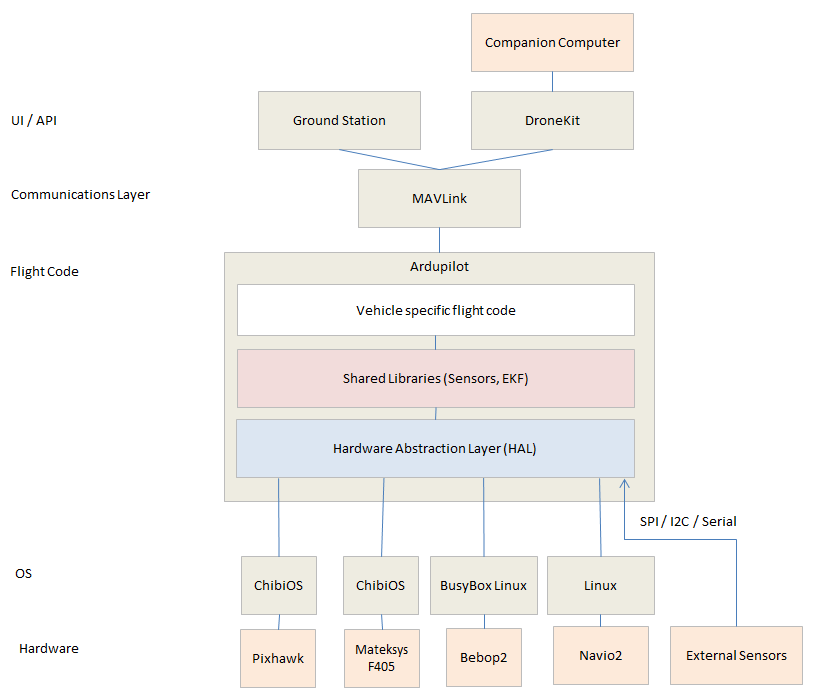
Below is a highlevel view of the ardupilot architecture.
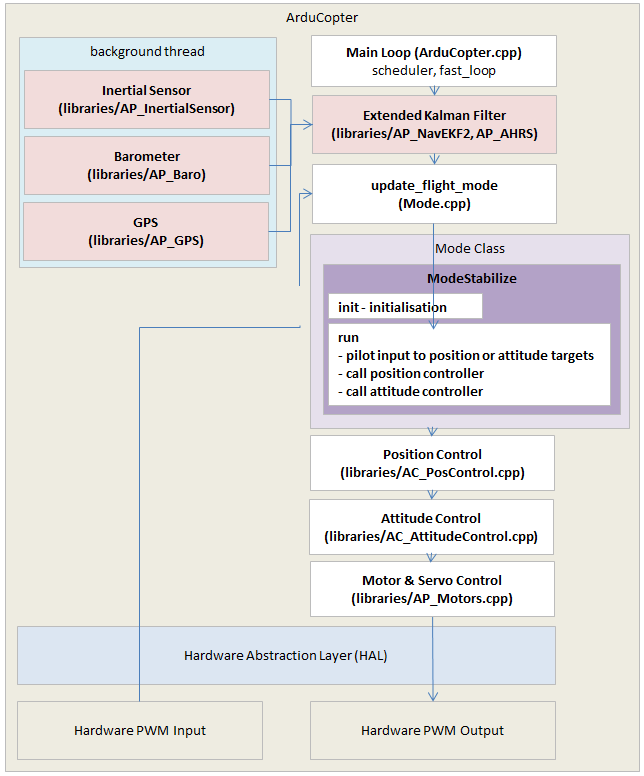
Below is a more zoomed in view (as compared to the above diagram) of the architecture.
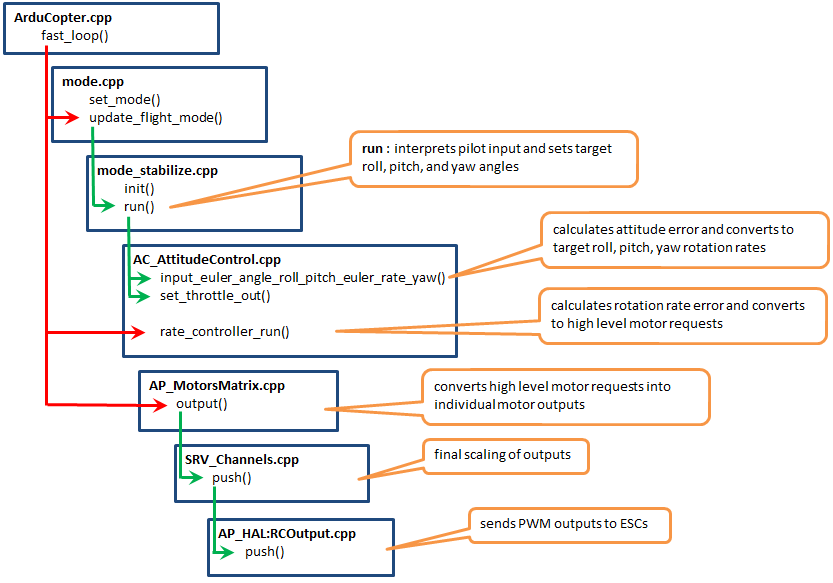
The image below shows the architecture of manual modes (i.e. Stabilize, Acro, Drift)
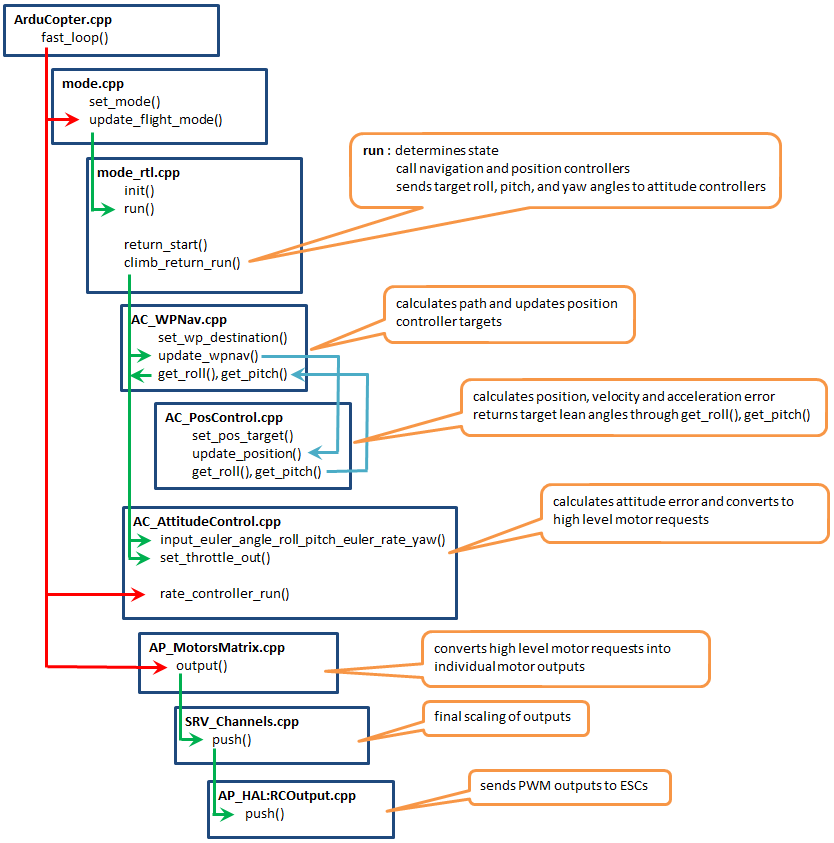
The image below shows the architecture of autonomous modes (i.e. RTL, Guided, Auto)