Pixracer Pro¶
The Pixracer Pro is the next generation autopilot of mRo’s Pixracer family.
Overview¶
The Pixracer Pro is the next generation of mRobotics’ family of Pixracer autopilots. It has been designed primarily for the demanding requirements of small multicopters, but of course can be used on planes and other vehicles which require no more than 8 pwm outputs for controlling escs and motors.
Tip
At time of writing the autopilot is still being evolved/improved. The final version may very slightly from the information provided here.
Specifications¶
Processor:
MCU - STM32H743IIK6
2MB flash allows full features of ArduPilot to be flashed
256KB FRAM - FM25V02-G
Sensors
Gyro/Accelerometer: Invensense ICM-20948 / Gyro / Mag (? KHz)
Gyro/Accelerometer: Invensense ICM-20602 Accel / Gyro (? KHz)
Gyro/Accelerometer: Bosch BMI088 Accel / Gyro (? KHz)
Barometer: DSP310
Power
5-5.5VDC from USB or PowerBrick connector. Optional/recommended ACSP4 +5V/+12V Power Supply.
Ultra low noise LDOs for sensors and FMU
Interfaces/Connectivity
MicroSD card reader
Micro-C USB
RGB LED
GPS (serial + I2C)
TELEM1/TELEM2
FrSky Telemetry serial port
On-Board Buzzer
8 Servo/Motor Outputs, 3.3V (default) or 5V level selectable (GPIO 74)
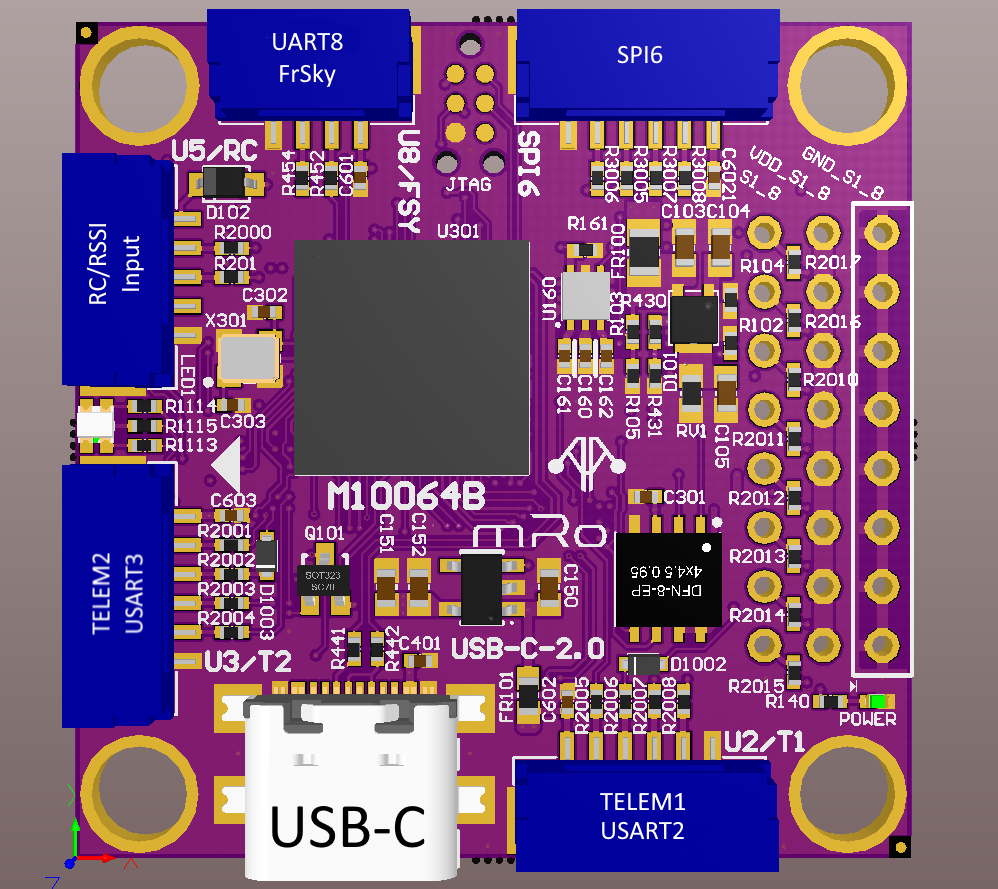
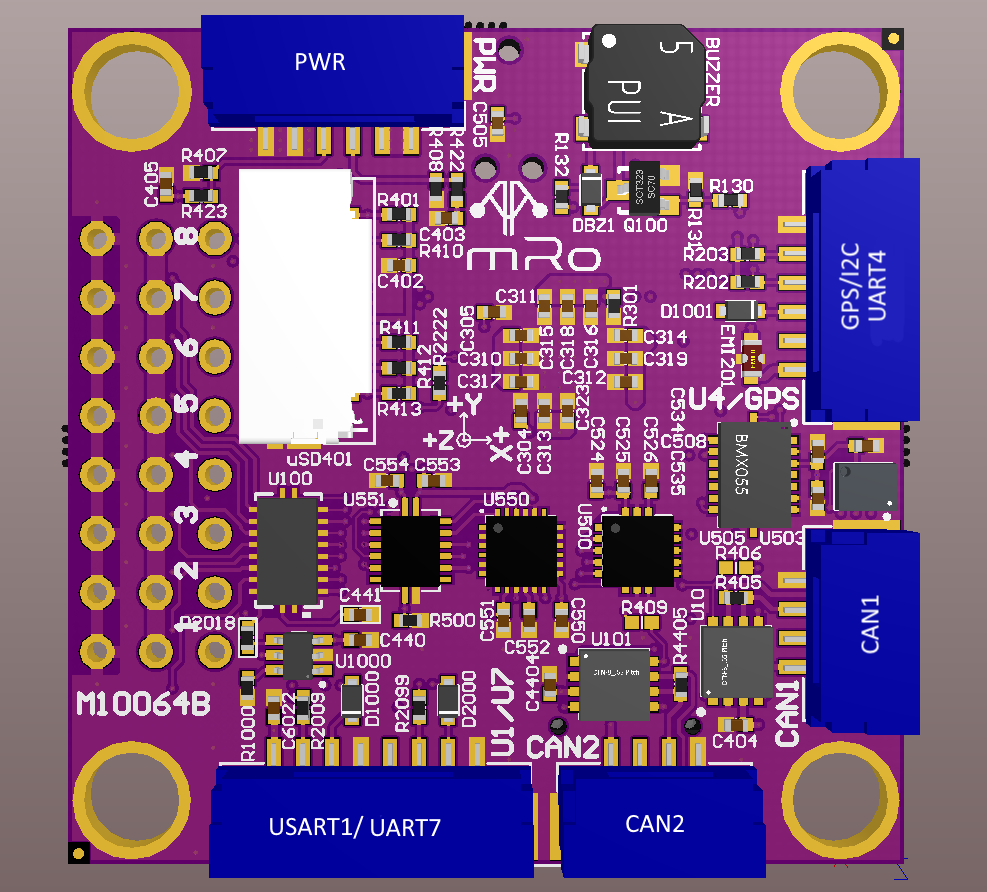
Connectors: GPS+I2C (USART4), RC-IN/PPM-IN/RSSI/SBus-IN/Spektrum-IN, USART3 (TxD, RxD, CTS, RTS), USART2 (TxD, RxD, CTS, RTS), USART8(FRSky-IN/FRSky-OUT), CAN1, CAN2, SERVO1-SERVO8, USART1/USART7 (TxD, RxD), SPI6, POWER-BRICK (VDD, Voltage, Current, GND).
Dimensions
Weight ?
Size
Connector pin assignments¶
Unless noted otherwise all connectors are JST GH
USART2,USART3 (TELEM1/TELEM2)connectors¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V |
+5V |
2 |
TX |
+3.3V/5V |
3 |
RX |
+3.3V/5V |
2 |
CTS |
+3.3V |
3 |
RTS |
+3.3V/5V |
6 |
GND |
GND |
UART1/UART7 connector¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V |
+5V |
2 |
TX1 |
+3.3V/5V |
3 |
RX1 |
+3.3V/5V |
4 |
GND |
GND |
5 |
+5V |
+5V |
6 |
TX7 |
+3.3V/5V |
7 |
RX7 |
+3.3V/5V |
8 |
GND |
GND |
USART4 (GPS+I2C) connector¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V |
+5V |
2 |
TX |
+3.3V/5V |
3 |
RX |
+3.3V/5V |
4 |
SCL |
+3.3V/5V |
5 |
SDA |
+3.3V/5V |
6 |
GND |
GND |
USART8 (FrSky Telemetry)¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V |
+5V |
2 |
TX |
+3.3V/5V |
3 |
RX |
+3.3V/5V |
4 |
GND |
GND |
RC/RSSI Input Connector(accepts PPM / S.BUS / Spektrum / SUMD / ST24)¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+4.5V |
+4.5V ** |
2 |
RC input (USART6 RX) |
+3.3V/5V |
3 |
RSSI input |
+3.3V/5V |
4 |
+3.3V |
+3.3V (for Spektrum RX power) |
5 |
GND |
GND |
** normally supply outputs only valid when power module is powered, but this output is also active when USB is connected.
CAN1 and CAN2 connectors¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V |
+5V |
2 |
CH |
+3.3V/5V |
3 |
CL |
+3.3V/5V |
4 |
GND |
GND |
Power connector¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V in |
+5V |
2 |
+5V in |
+5V |
3 |
CURR sense in |
+3.3V/5V |
4 |
VOLT sense in |
+3.3V/5V |
5 |
GND |
GND |
6 |
GND |
GND |
SPI6 connector¶
PIN |
SIGNAL |
VOLTAGE/TOLERANCE |
|---|---|---|
1 |
+5V in |
+5V |
2 |
MISO |
+3.3V/5V |
3 |
SCK |
+3.3V/5V |
4 |
CS |
+3.3V/5V |
5 |
MOSI |
+3.3V/5V |
6 |
GND |
GND |
Default UART order¶
Parameter |
Default Protocol** |
Connector |
|---|---|---|
SERIAL0 |
console |
USB |
SERIAL1 |
Telemetry1 |
USART2 (supports CTS and RTS signaling) |
SERIAL2 |
Telemetry2 |
USART3 (supports CTS and RTS signaling) |
SERIAL3 |
GPS1 |
UART4 |
SERIAL4 |
GPS2 |
UART8 (targeted for FrSky Telem, but must change SERIAL4_PROTOCOL) |
SERIAL5 |
USER |
USART1 |
SERIAL6 |
USER |
UART7 |
SERIAL7 |
SLCAN |
USB (second composite USB interface) |
** User may change SERIALx_PROTOCOL as required for application
Dshot capability¶
All motor/servo outputs are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. The output groups that must be the same (PWM rate or Dshot, when configured as a normal servo/motor output) are: 1/2/3/4, 5/6, and 7/8.