CSKY405¶
Note
Due to flash memory limitations, this board does not include all ArduPilot features. See Firmware Limitations for details.
Specifications¶
Processor
STM32F405RGT6 ARM (168MHz)
AT7456E OSD
Sensors
BMI088 IMU (accel, gyro)
BMP390 barometer
Voltage & 90A(215A PEak) current sensor
Power
2S-6S DC input power
5V, 2.5A BEC for servos
12V, 2A BEC for video
Interfaces
6x UARTS
10x PWM outputs
1x RC input with inverter for SBUS/PPM
I2C port for external compass and airspeed sensor
Type-C USB port
SD Card Slot
Where to Buy¶
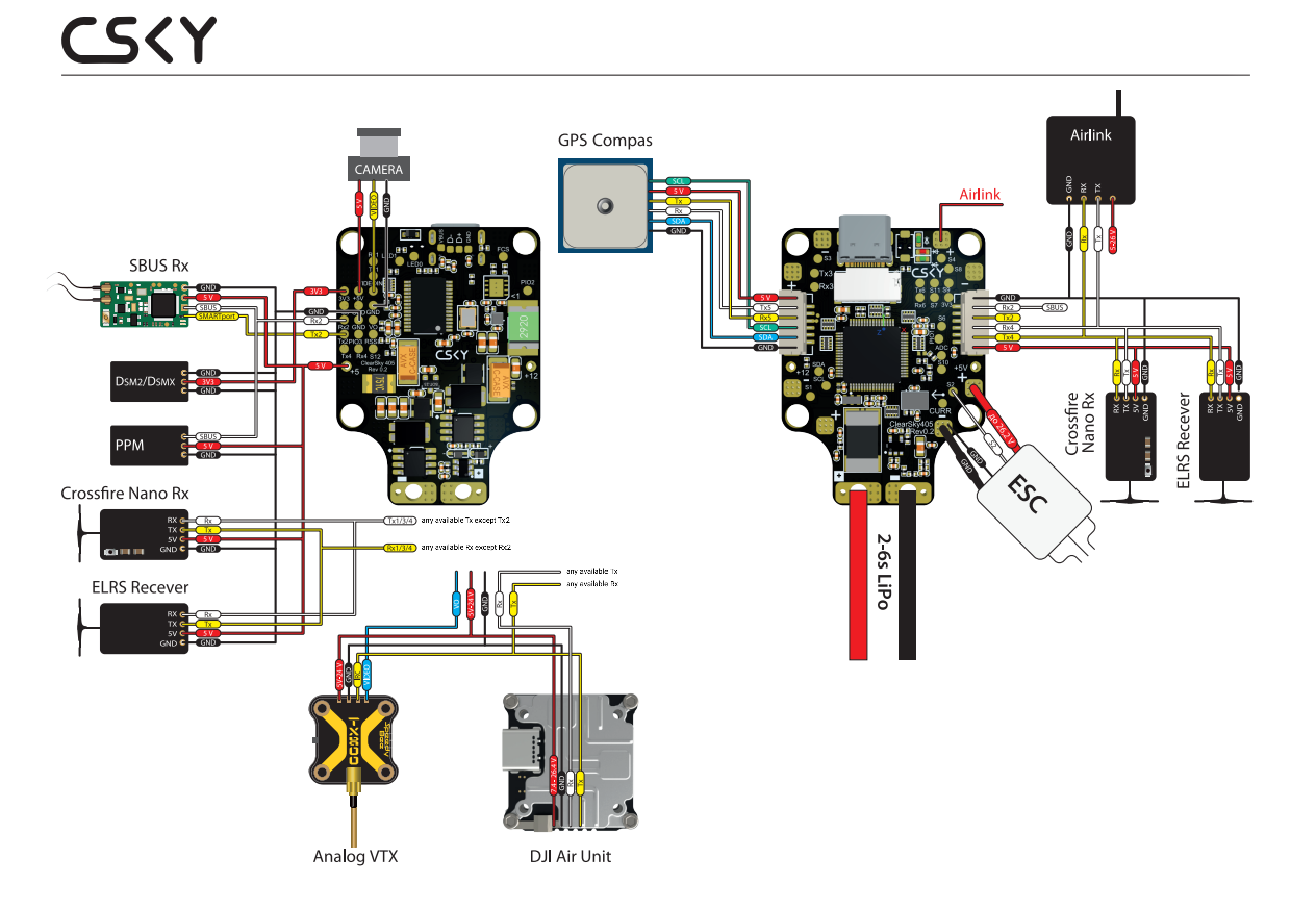
Typical Wiring Diagram¶
Default UART order¶
SERIAL0 = console = USB
SERIAL1 = UART4 (MAVLink2)
SERIAL2 = USART1 (MAVLink2, DMA capable)
SERIAL3 = UART5 (GPS)
SERIAL4 = USART3 (GPS, TX3 DMA capable)
SERIAL5 = USART6 ((User, TX3 DMA capable)
SERIAL6 = USART2 (RCinput on RX2, to use as normal UART input use BRD_ALT_CONFIG = 1)
Serial protocols shown are defaults, but can be adjusted to personal preferences.
OSD Support¶
The CSKY405 supports using its internal OSD using OSD_TYPE 1 (MAX7456 driver). External OSD support such as DJI or DisplayPort can be supported using USART6 or any other free UART. See MSP OSD for more info.
PWM Outputs¶
The CSKY405 supports up to 10 PWM outputs. All outputs support DShot.
The PWM is in 5 groups:
PWM 1 in group1
PWM 2 in group2
PWM 3,4 in group3
PWM 5,6,10 in group4
PWM 7 in group5
PWM 8,9 in group6
RC Input¶
RC input is configured on the RX2 pin. It supports all single wire RC protocols except bi-directional serial protocols such as CRSF, ELRS, etc. Instead, these devices can be connected using both TX2 and RX2 if if BRD_ALT_CONFIG = 1 and SERIAL6_PROTOCOL set to “23”.
PPM is not supported.
DSM/SRXL connects to the RX2 pin.
FPort requires connection to TX2 and RX2 via a bi-directional inverter. See FPort Receivers.
CRSF also requires a TX2 connection, in addition to RX2, and automatically provides telemetry. Set SERIAL6_PROTOCOL to “23”
SRXL2 requires a connection to TX2 and automatically provides telemetry. Set SERIAL6_OPTIONS to “4” and SERIAL6_PROTOCOL set “23”.
Battery Monitor Configuration¶
These settings are set as defaults when the firmware is loaded (except BATT_AMP_PERVLT which needs to be changed from the default value). However, if they are ever lost, you can manually set the parameters:
Enimages/CSKY405_wiring.pngable Battery monitor.
BATT_MONITOR =4
Then reboot.
BATT_AMP_PERVLT 10.35
VTX power control¶
GPIO 84 controls the VTX BEC output to pins marked “12V”. Setting this GPIO high using an Auxiliary Functions or Relay Switch removes voltage supply to pins.
Connecting a GPS/Compass module¶
This board does not include a GPS or compass so an external GPS/compass should be connected as shown below in order for autonomous modes to function.
Firmware¶
Firmware for this board can be found here in sub-folders labeled “CSKYF405”.
Loading Firmware¶
Firmware for these boards can be found at https://firmware.ardupilot.org in sub-folders labeled CSKY405.
Initial firmware load can be done with DFU by plugging in USB with the boot button pressed. Then you should load the “CSKY405_bl.hex” firmware, using your favorite DFU loading tool.
Subsequently, you can update firmware with Mission Planner.